Soyez patient, cet article / partie sera bientôt prêt ! Faites moi savoir votre impatience via les commentaires 😉
Sommaire
Définition
Le Lidar mesure la distance entre lui et l’objet distant. Pour cela, il projette une impulsion laser dans une direction donnée. Si le laser frappe un objet proche, le lidar peut obtenir sa mesure, par exemple, à partir du temps pris par l’impulsion pour revenir à lui.
Il fonctionne de fait comme le Sonar (ondes acoustiques) ou le Radar (ondes radio), mais reste précis grâce au faible angle d’ouverture de son faisceau laser. En pratique, le sonar et le radar ne détectent que les grandes surfaces la ou le laser détecter les trous de cette dernière. Le désavantage du lidar se situe
Un lidar simple perçoit son environnement en 1D. Il ne voit que devant lui. D’autres lidars, montés sur moteurs ou adoptant une technologie particulière ont un champ de vision plus grand
- pivoter sur 1 axe pour voir leur environnement en 2D
- pivoter sur 2 axe pour voir leur environnement en 3D
- Déterminer la vitesse de l’objet en mesurant le décalage de fréquence entre l’onde lumineuse émise et reçue
Caractéristiques
Les principales particularités du Lidar sont les suivantes :
- Étendue (mode DEFAULT) : min 0.05m – max 0.4m / 1.2m
- Étendue (mode LONG RANGE) : min 0.05m – max 0.4m / 2m
- Précision : 3% / 12%
- Laser : Classe 1 (VCSEL)
- Longueur d’onde : 940nm (IR)
- Angle faisceau : ?
Les perturbations influent sur les mesures (d’où une forte différence de mesures concernant les étendues et les perturbations. Perturbations possibles :
- Sources IR : Oui (Soleil lors d’une utilisation à l’extérieur, …),
- Matériaux absorbant les IR : Oui (Surfaces grises, noires …),
- Matériaux transparents aux IR : Oui
- Autres lidars de marque différente / de même marque : A tester
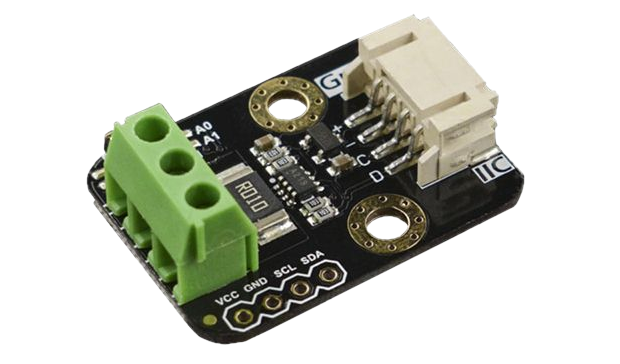
broches :
| VIN | Alimentation 2,8 – 5V |
| GND | Masse |
| SCL | Broche horloge I2C Jusqu’à 400 kHz (mode FAST) |
| SDA | Broche données I2C Adresse 0x29, modifiable via les valeurs registres |
| G / GPIO | Sortie logique 0 – 2.8V. Indique la présence d’une nouvelle mesure. |
| X / XSHUT / SHDN | Entrée logique 0 – 2.8V par défaut à 1. Accepte jusqu’à 5V. Désactive le capteur si mis à 0. |
Préparation
Adafruit a conçu une librairie Arduino pour ce module. Aussi, le test sera réalisé avec une carte Arduino UNO branchée en I2C à la carte VL53L0X :
- Installez l’IDE Arduino
- Installer la librairie : Croquis > Inclure une bibliothèque > Gérer les bibliothèques > Adafruit_VL53L0X
- Ouvrez le sketch exemple : Fichier > Exemples > Adafruit_VL53L0X > vl53l0x
- Branchez votre carte, configurez le bon type de carte et le port (Outils)
- Uploadez le sketch, une fois fini, ouvrez le moniteur série (115200 bauds)
Code vl53l0x :
Premiers essais
Sources
- https://fr.wikipedia.org/wiki/Lidar
- https://www.digikey.com/en/datasheets/stmicroelectronics/stmicroelectronics-endm00279086
- https://learn.adafruit.com/adafruit-vl53l0x-micro-lidar-distance-sensor-breakout/overview