Soyez patient, cet article / partie sera bientôt prêt ! Faites moi savoir votre impatience via les commentaires 😉
Sommaire
I – Caractéristiques
Matériel
- Carte Raspberry Pi 4 (Modèle 4Go)
- Boîtier avec refroidissement actif recommandé (ventilateur)
- Alimentation par câble USB-C
- Carte SD 16 Go (J’utilise une Kingston 128Go V30)
- Câble Ethernet
Environnement
- PC (dans mon cas sous Windows 10 – 64 bits)
- Box Internet (sur lequel sera relié le PC et la Raspberry)
II – Préparation
1 – Installation de Raspbian sur la carte SD
- Insérez votre carte SD sur votre PC
- Téléchargez la dernière version desktop de Raspbian (Buster) sur le site officiel (environ 1Go)
- Installez la dernière version d’Etcher (v1.5.62) sur le site officiel
- Flashez Raspbian sur la carte SD à l’aide d’Etcher (la procédure est simple à suivre et ne prend que quelques minutes)
2 – Activation de la liaison SSH sur la carte SD
- Ouvrez l’explorateur windows
- Insérez votre carte SD sur votre PC
- Allez dans le disque Boot apparu dans l’explorateur Windows
- Créez un fichier texte vide et renommez le ssh (juste ssh, sans extension)
3 – Branchement et connexion à la Raspberry
- Insérez votre carte SD sur votre Raspberry
- Placez votre Raspberry dans son boitier (attention à la connectique du / des ventilateurs)
- Branchez votre Raspberry à la Box via Ethernet
- Alimentez votre Raspberry via le chargeur USB-C
- Recherchez l’IP de votre Raspberry (via votre box ou en tapant
<strong>arp -a</strong>sur le terminal de votre ordinateur) - Connectez-vous à la raspberry via ssh : Tapez sur le terminal (cmd ou Power-Shell) :
<strong>ssh pi@IP</strong>(exemple ssh pi@192.168.8.114)<strong>yes</strong>(lors de la demande d’acceptation de la « key fingerprint »)<strong>raspberry</strong>(lors de la demande du mdp)- Vous devriez obtenir
pi@raspberrypi:~ $
4 – Préparation de la Raspberry (VNC et SWAP)
sudo apt update && sudo apt upgrade(mis à jour du raspberry pi)sudo raspi-config>Interfacing Options>VNC>Yes>Finish(activation de la liaison graphique VNC)sudo nano /etc/dphys-swapfile>CONF_SWAPSIZE=2048>Ctrl+O>Ctrl+X(Augmentation de la partition SWAP à 2048 Mo)
5 – Installation de Rosdep
Renseignons les « repositories » et installons les dépendances
sudo sh -c 'echo "debhttp://packages.ros.org/ros/ubuntu$(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654sudo apt-get updatesudo apt-get install -y python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential cmake
Préparons rosdep
sudo rosdep initrosdep update
6 – Installation de Melodic (Desktop) dans l’environnement Catkin
Préparons l’environnement catkin et allons-y :
mkdir ~/ros_catkin_wscd ~/ros_catkin_ws
Préparons y la version ROS Melodic (mode desktop) dans un sous-dossier « src ». Le mode desktop permet d’installer la quasi totalité des packages ROS. Vous pouvez opter pour d’autres modes.
rosinstall_generator desktop --rosdistro melodic --deps --wet-only --tar > melodic-desktop-wet.rosinstallwstool init -j8 src melodic-desktop-wet.rosinstall
Fixons quelques erreurs dans notre version ROS Melodic avec l’installation d’assimp pour corriger quelques problèmes de dépendances (collada_urdf)
mkdir -p ~/ros_catkin_ws/external_srccd ~/ros_catkin_ws/external_srcwget http://sourceforge.net/projects/assimp/files/assimp-3.1/assimp-3.1.1_no_test_models.zip/download -O assimp-3.1.1_no_test_models.zipunzip assimp-3.1.1_no_test_models.zipcd assimp-3.1.1cmake .makesudo make install
Installons OGRE pour le package rviz
sudo apt-get install libogre-1.9-dev
Installons les dernières dépendances manquantes
cd ~/ros_catkin_wsrosdep install --from-paths src --ignore-src --rosdistro melodic -y
Compilons les packages catkin (plus de 180, peut durer plusieurs heures)
sudo ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/melodic -j2echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsudo reboot now
Pour finir, testons notre installation en lançant roscore
roscore
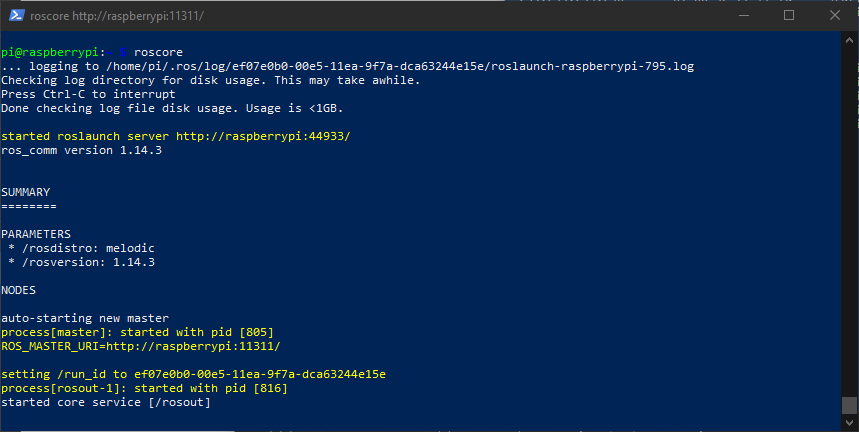
roscore